



Revolucija autonomne vožnje: Kako Tesla rješava problem GPS mrtvih zona
Uvod
Uz nevjerojatan napredak u automobilskoj industriji, sustav globalnog pozicioniranja (GPS) dugo je bio ključni alat za navigaciju. Za većinu vozača, gubitak GPS signala zbog ulaska u podzemnu garažu ili gustu urbanizaciju može biti neugodnost, no za autonomna vozila, to predstavlja ozbiljan izazov. Tesla je, međutim, predstavila inovativno rješenje kroz svoj patent nazvan “Tehnike modeliranja za određivanje staze temeljene na viziji” (US 2026/0098740), koji bi mogao preobraziti način na koji autonomna vozila percipiraju svoje okruženje.
Problem s betonskim kanjonima
Da bismo shvatili važnost ovog patenta, moramo prvo razjasniti na koji način tradicionalna lokalizacija funkcionira. Autonomna vozila obično koriste GPS, ali taj sustav ne može raditi u određenim okruženjima, kao što su podzemne garaže ili kanjoni između visokih zgrada. U tim situacijama, GPS signal potpuno nestaje. Bez njega, autonomni sustavi su osujećeni i nemaju mogućnost točne lokalizacije, što rezultira opasnim situacijama u kojima vozilo može “letjeti naslijepo”.
Vizualni mozak autonomnog vozila
Tesla je shvatila da se oslanjanje na vanjske GPS podatke može pokazati kao slabost. Njihovo rješenje uključuje upotrebu vlastitih kamera i senzora kako bi se stvorila trodimenzionalna slika okoline. Patent detaljno opisuje način na koji vozilo koristi vlastite kamere za stvaranje 3D modela koji omogućuje autonomno vožnju bez vanjskog navodila.
Integrirajući princip duboke neuronske mreže, Tesla razvija sustav koji analizira svoje okruženje u stvarnom vremenu. Umjesto oslanjanja na GPS, vozilo dijeli prostor na sićušne jedince, poznate kao vokseli, kako bi odredilo što zauzima taj dio. Time stvara utisak o “popunjenosti” svakog voksel prostora, prepoznajući prepreke poput drugih automobila ili betonskih zidova.
Pristup lokalizaciji bez GPS-a
Iako je kartiranje okoliša ključno, vozilo također treba znati svoju točnu poziciju unutar nove karte. U patentu se detaljno opisuje kako se vozilo oslanja na “ključne značajke slike” da bi odredilo svoju lokaciju. Ove značajke mogu uključivati jasno definirane objekte u okolini, poput znakova ili istaknutih građevinskih elemenata.
Dok se automobil kreće, on prati te značajke kroz uzastopne video okvire, mjereći njihove udaljenosti i kutove. Time se stvara virtualni svemir u kojem vozilo može nezavisno navigirati, bez potrebe za vanjskom referencom.
Optimizacija putanje
Jedan od ključnih koraka nakon utvrđivanja lokacije je optimizacija putanje. Patent opisuje upotrebu iterativnog linearnog kvadratnog regulatora koji izračunava najsigurniji i najglađi put prema naprijed. To omogućava vozilu da neprestano prilagođava svoju brzinu, kuteve i bočne pokrete kako bi uspješno navigiralo kroz izazovne prepreke.
Primjena rješenja u stvarnom životu
Već sada možemo primijetiti kako ovaj pristup potencijalno transformira vožnju u stvarnom svijetu. Primjerice, funkcija “Actually Smart Summon” koristi ovo vizualno mapiranje kako bi autonomna vozila mogla učinkovito pronalaziti aplikacije unutar podzemnih garaža, bez oslanjanja na GPS.
Tik do automata za izdavanje karata, vozilo ne samo da se oslanja na svoje vlastite senzore nego koristi složene metode mapiranja kako bi se osiguralo da ne udari u prepreke kao što su pješaci ili kolica.
Sistemska integracija s humanoidnim robotima
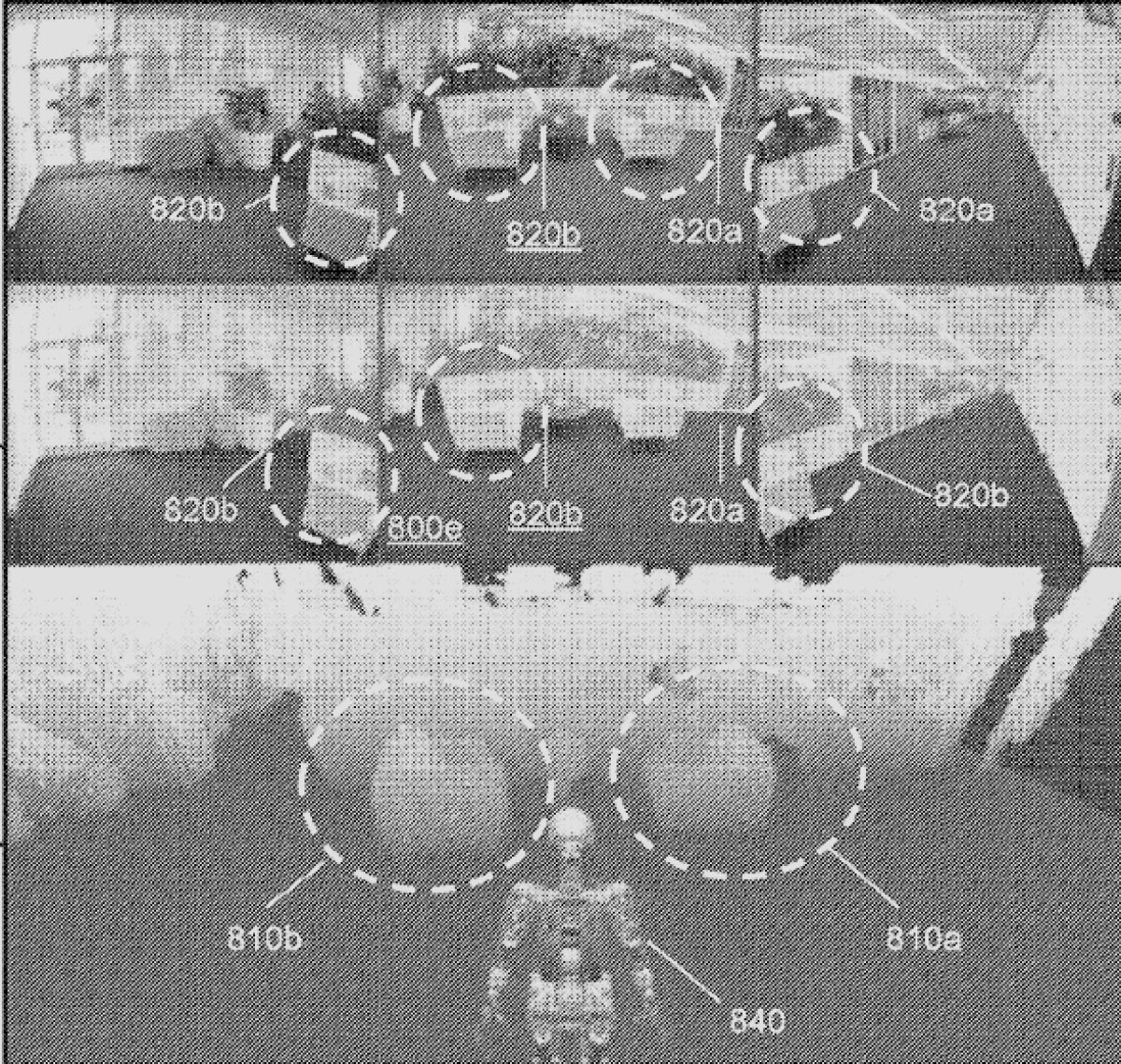
Jedna od najuzbudljivijih karakteristika ovog patenta je njegova povezanost s projektom humanoidnog robota Optimus. Dok autonomna vozila suočavaju s problemom GPS mrtvih zona, humanoidni roboti većinu svog vremena provode u tim okruženjima. Bez pouzdane GPS lokacije, robot mora biti sposoban razumjeti i navigirati svoje okruženje samo s kamerama.
Koristeći istu arhitekturu umjetne inteligencije kao i autonomna vozila, Optimus će generirati 3D voksel karte svog okruženja i identificirati ključne značajke za navigaciju, poput namještaja ili aparata. Time će robotske jedinice biti spremne za rad u dinamičkim okruženjima.
Zaključak
Inovativne tehnike koje Tesla razvija za rješavanje problema GPS mrtvih zona predstavljaju značajan korak naprijed u autonomnoj vožnji i robotičkoj tehnologiji. Ova integracija različitih senzora i naprednih algoritama omogućuje vozilima i robotima da učinkovito funkcioniraju u najkompleksnijim okruženjima, postavljajući temelje za budućnost autonomne mobilnosti.

